L-741.131100
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw

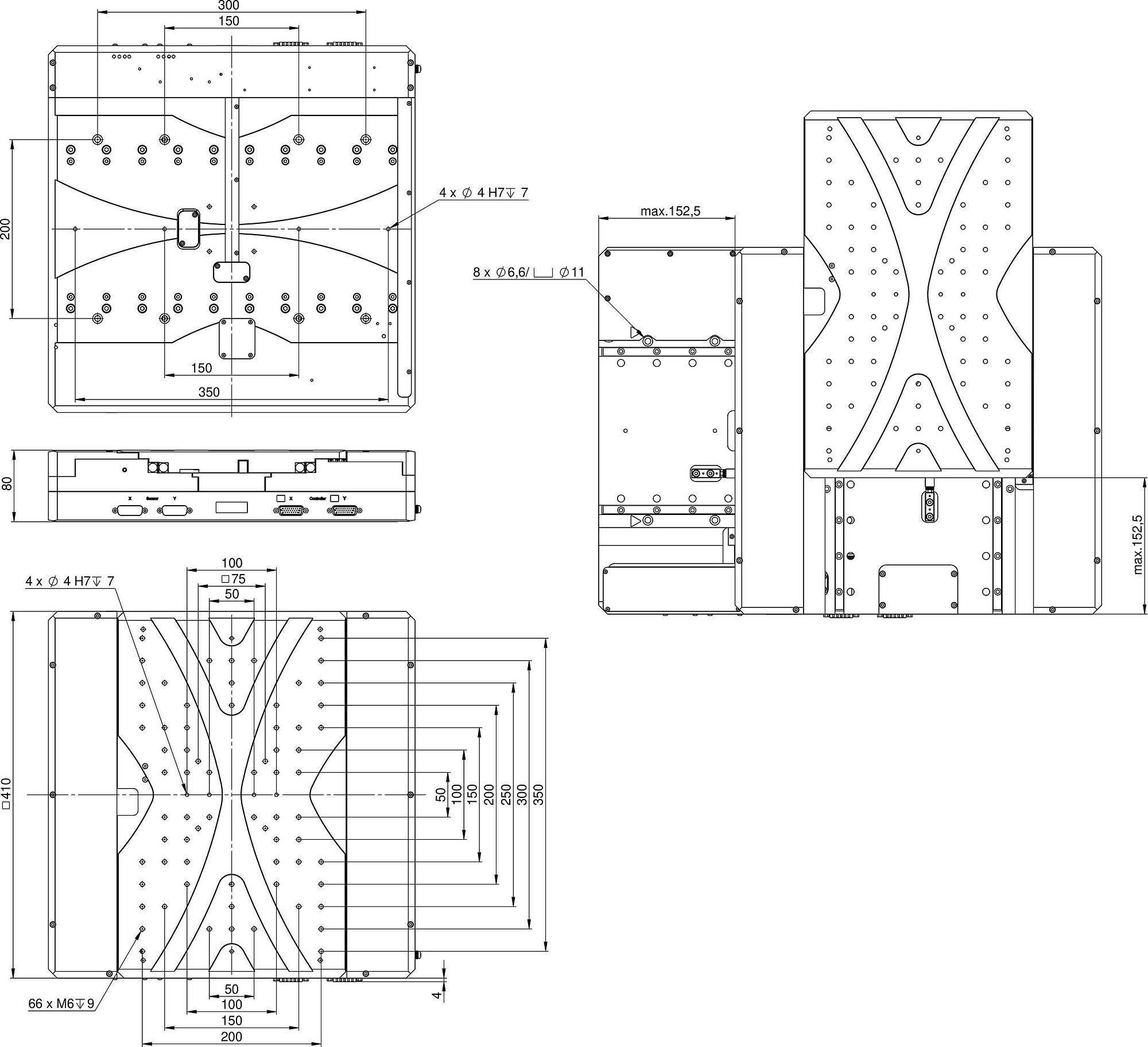
L-741.13x1xx, dimensions in mm


Highly accurate position measuring with incremental linear encoder
Noncontact optical linear encoders measure the position directly at the platform with the greatest accuracy. Nonlinearity, mechanical play or elastic deformation have no influence on the measurement. Optical limit and reference switches. More travel ranges on request.
Crossed roller guide
With crossed roller guides, the point contact of the balls in ball guides is replaced by line contact of the hardened rollers. Consequently, they are considerably stiffer and need less preload, which reduces friction and allows smoother running. Crossed roller guides are also distinguished by high guide accuracy and load capacity. Force-guided rolling element cages prevent cage creep.
Drive types
Application fields
Medical industry. Laser cutting. Biotechnology. Measuring technology. Laser inscription.
| Motion | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | |
| Travel range in X | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Travel range in Y | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Maximum velocity in X, unloaded | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Maximum velocity in Y, unloaded | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Orthogonality | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | typ. |
| Straightness error E_YX (straightness) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Straightness error E_ZX (flatness) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Angular error E_AY (pitch) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Angular error E_BX (pitch) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Angular error E_CX (yaw) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Angular error E_CY (yaw) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Positioning | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Minimum incremental motion in X | 1 µm | 0.05 µm | 0.05 µm | 0.1 µm | 0.5 µm | 0.8 µm | typ. |
| Minimum incremental motion in Y | 1 µm | 0.05 µm | 0.05 µm | 0.1 µm | 0.5 µm | 0.8 µm | typ. |
| Unidirectional repeatability in X | ± 0.05 µm | ± 0.025 µm | ± 0.025 µm | ± 0.05 µm | ± 0.25 µm | ± 0.4 µm | typ. |
| Unidirectional repeatability in Y | ± 0.05 µm | ± 0.025 µm | ± 0.025 µm | ± 0.05 µm | ± 0.25 µm | ± 0.4 µm | typ. |
| Bidirectional repeatability in X | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Bidirectional repeatability in Y | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Reference switch | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | |
| Reference switch repeatability | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | |
| Limit switches | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | Forked photoelectric sensor, N/C contact, 5 V, NPN | |
| Integrated sensor | — | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | Incremental linear encoder | Incremental rotary encoder | |
| Sensor signal | — | Sin/cos, 1 V peak-to-peak | A/B quadrature, RS-422 | Sin/cos, 1 V peak-to-peak | A/B quadrature, RS-422 | A/B quadrature, RS-422 | |
| Sensor signal period | — | 20 µm | — | 20 µm | — | — | |
| Sensor resolution | — | 1 nm | 10 nm | 1 nm | 10 nm | — | |
| Sensor resolution | — | — | — | — | — | 20000 Cts./rev. | |
| Drive properties | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Drive type | 2-phase stepper motor | 2-phase stepper motor | 2-phase stepper motor | DC motor | DC motor | DC motor | |
| Operating voltage | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Nominal current, RMS | 1.2 A | 1.2 A | 1.2 A | 3.9 A | 3.9 A | 3.9 A | typ. |
| Motor resolution | 200 Full steps/rev. | 200 Full steps/rev. | 200 Full steps/rev. | — | — | — | |
| Drive force in X | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Drive force in Y | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Resistance phase-phase | 3.4 Ω | 3.4 Ω | 3.4 Ω | 0.62 Ω | 0.62 Ω | 0.62 Ω | typ. |
| Mechanical properties | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Permissible push force in Z | 200 N | 200 N | 200 N | 200 N | 200 N | 200 N | max. |
| Permissible torque in θX | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Permissible torque in θY | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Permissible torque in θZ | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Moved mass in X, unloaded | 19900 g | 19900 g | 19900 g | 20200 g | 20200 g | 20200 g | |
| Moved mass in Y, unloaded | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | |
| Drive screw type | Ball screw | Ball screw | Ball screw | Ball screw | Ball screw | Ball screw | |
| Drive screw pitch | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | |
| Guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | Crossed roller guide | |
| Overall mass | 27500 g | 27500 g | 27500 g | 28000 g | 28000 g | 28000 g | |
| Material | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | Black anodized aluminum | |
| Miscellaneous | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Tolerance |
| Operating temperature range | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | |
| Connector | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | 2 × HD D-sub 26 (m) | |
| Sensor connector | — | 2 × D-sub 15 (f) | — | 2 × D-sub 15 (f) | — | — | |
| Recommended controllers/drivers | G-901.R319 G-902.R2E001 C-663.12, C-885 with C-663.12C885 ACS modular controller | G-901.R319 G-902.R2E001 ACS modular controller | G-901.R319 G-902.R2E001 C-663.12, C-885 with C-663.12C885 ACS modular controller | G-901.R319 G-902.R2E001 ACS modular controller | G-901.R319 G-902.R2E001 C-863.12, C-885 with C-863.20C885 ACS modular controller | G-901.R319 G-902.R2E001 C-863.12, C-885 with C-863.20C885 ACS modular controller |
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
L-741 / V-741 Precision XY Stage
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw
Precision XY stage; 2-phase stepper motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
Precision XY stage; 2-phase stepper motor; 305 mm x 305 mm travel range (X × Y); 200 N load capacity; 45 mm/s × 45 mm/s maximum velocity; ball screw; incremental linear encoder, 10 nm sensor resolution, A/B quadrature, RS-422
Precision XY stage; DC motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 50 mm/s × 50 mm/s maximum velocity; ball screw; incremental linear encoder, 20 µm sensor signal period, sin/cos, 1 V peak-peak
Precision XY stage; DC motor; 305 mm x 305 mm travel range (X × Y); 200 N load capacity; 50 mm/s × 50 mm/s maximum velocity; ball screw; incremental linear encoder, 10 nm sensor resolution, A/B quadrature, RS-422
Precision XY stage; DC motor; 305 mm × 305 mm travel range (X × Y); 200 N load capacity; 90 mm/s × 90 mm/s maximum velocity; ball screw; incremental rotary encoder, 20000 counts/rev sensor resolution, A/B quadrature, RS-422
Ricevere rapidamente una risposta alla tua risposta via email o telefono da un Sales Engineer dalla sede PI più vicina a te.

I posizionatori, con corse da diversi millimetri fino a un metro, utilizzano solitamente componenti a guida meccanica quali ball bearings.
![[Translate to Italian:] Q-522 Q-Motion® Miniature Linear Stage with Incremental Encoder with up to 1 nm resolution (optional)](/fileadmin/_processed_/9/1/csm_PI_Q-522_bdff51696d.jpg)
PI utilizza sistemi di misurazione incrementali per lunghe corse, partendo da circa un millimetro. Questi sensori, che nella maggior parte sono ottici, raggiungono una risoluzione di posizionamento al di sotto del range del picometro.

I motori elettrici rotativi quali i DC o gli stepper motor vengono utilizzati in connessione con dispositivi a vite o a vite senza fine.

Le piattaforme Hexapod vengono utilizzate per il posizionamento e l'allineamento di precisione di carichi in tutti i sei gradi di libertà. tre assi lineari, e tre assi di rotazione.

Che si tratti di medicina, medicina legale o genetica, il genoma è la chiave di nuove risposte a numerose domande. Il metodo noto come sequencing-by-synthesis, utilizzato per decifrare il genoma, è diventato più veloce e più preciso da quando è stato sviluppato - il costo, in confronto, è diminuito. Le tecniche di posizionamento utilizzate nei microscopi usati hanno anch'esse contribuito a questo...

La moderna tecnologia medica si concentra sullo sviluppo di terapie che causino il minor disagio possibile ai pazienti. Gli endoscopi che permettono di mettere in atto una chirurgia minimamente invasiva forniscono un importante contributo, ad esempio in laparoscopia. Specialmente durante gli interventi medici, la richiesta di informazioni mirate e dettagliate sulle immagini è della massima...

Nella radioterapia, i singoli strati vengono regolati in modo che il tessuto sano offra la protezione ottimale dalle radiazioni.
Nella chirurgia refrattiva, sono determinanti il posizionamento ad alta precisione e il controllo del movimento del laser al fine di ottenere buoni risultati. Gli stadi piezoelettrici e i sistemi tip/tilt mirror offrono la precisione richiesta, sono dinamici e veloci e quindi aiutano ulteriormente a ridurre il tempo di trattamento.

Gli scanner piezoelettrici veloci, operano alle necessarie velocità nell'intervallo di video frequenza per la stabilizzazione di immagine e il microscanning.

I dispositivi piezo sono particolarmente indicati nelle terapie a risonanza magnetica, perchè non vengono influenzati da forti campi magnetici.
Gli attuatori e i dispositivi piezo, quali i motori OEM PILine®, assicurano l'elevata precisione e stabilità di posizionamento richiesta dalla tomografia a coerenza ottica (OCT).

I motori piezo sono particolarmente indicati per il pipettaggio con piccoli dispositivi e per la separazione di campioni e offrono la possibilità di muovere le pipette in direzione verticale.



















