H-820.D2
Hexapod, basic model; 20 kg payload; 20 mm/s maximum velocity; D-sub connector. Connecting cables are not included in the scope of delivery and must be ordered separately.


Maximum loads on the H-820.D2 when mounted horizontally

Maximum loads on the H-820.D2 when mounted at the most unfavorable angle

Maximum loads on the H-820.D2 when mounted vertically

Maximum permissible force acting on the H-820.D2 when mounted horizontally
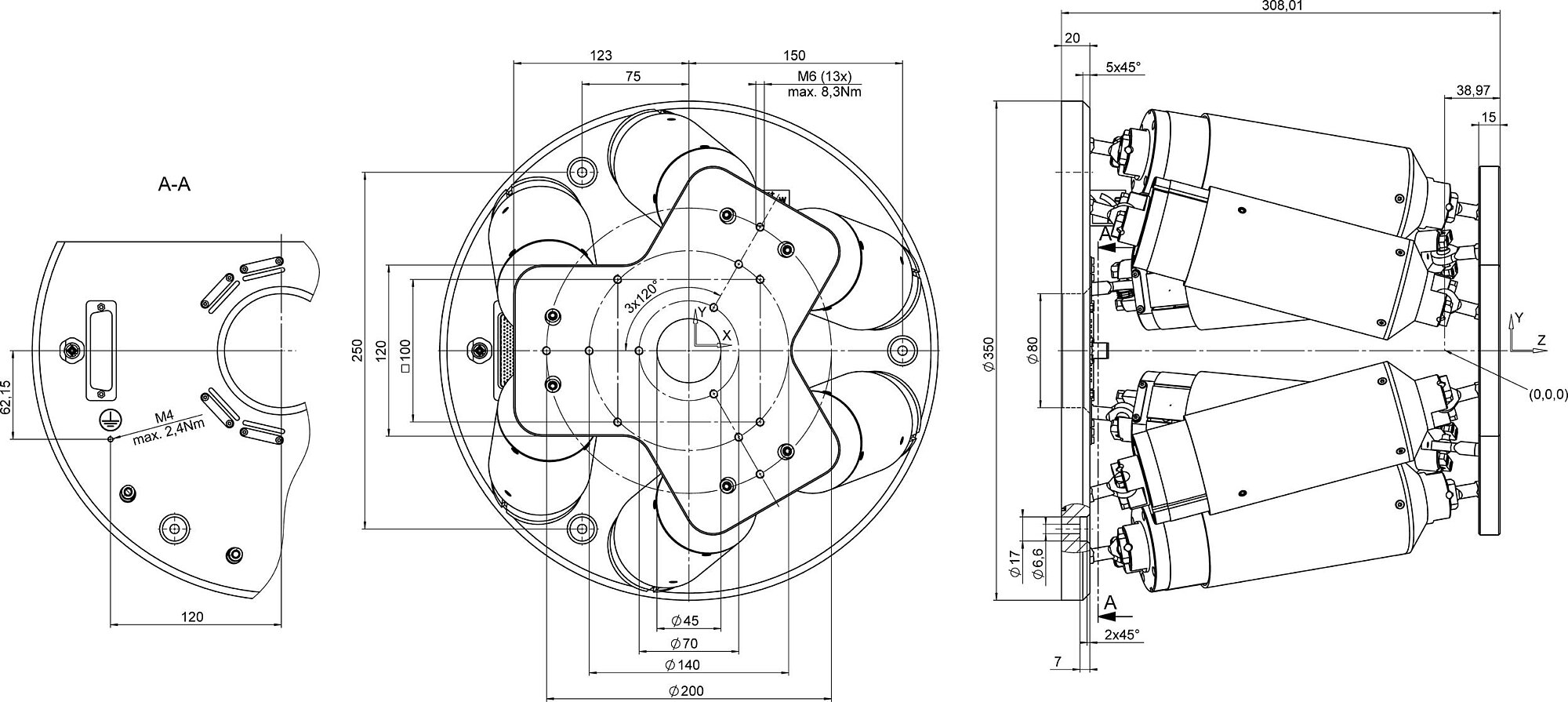
H-820.D2, dimensions in mm, at zero position of nominal travel range






Standard-class 6-axis positioning system
Parallel-kinematic design for 6 degrees of freedom, making it significantly more compact and stiff than serial-kinematic systems, higher dynamics, no moved cables: higher reliability, reduced friction
BLDC motor
Brushless DC motors are particularly suitable for high rotational velocities. They can be controlled very accurately and ensure high precision. Because they dispense with sliding contacts, they run smoothly, are wear-free and therefore achieve a long lifetime.
Indirect measuring principle
Rotary encoder on motor shaft
PIVirtualMove
The simulation software simulates the limits of the workspace and payload of a hexapod. Therefore, even before purchasing, you can check whether a particular hexapod model can handle the loads, forces, and torques occurring in an application. For this purpose, the simulation tool takes the position and motion of the hexapod as well as the pivot point and several reference coordinate systems into account.
Application fields
Industry and research. For life science, biotechnology, automation, micromachining
| Motion | H-820.D2 | Tolerance |
|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 50 mm | |
| Travel range in Y | ± 50 mm | |
| Travel range in Z | ± 25 mm | |
| Rotation range in θX | ± 15 ° | |
| Rotation range in θY | ± 15 ° | |
| Rotation range in θZ | ± 30 ° | |
| Maximum velocity in X | 20 mm/s | |
| Recommended velocity in X | 2 mm/s | |
| Maximum velocity in Y | 20 mm/s | |
| Recommended velocity in Y | 2 mm/s | |
| Maximum velocity in Z | 20 mm/s | |
| Recommended velocity in Z | 2 mm/s | |
| Maximum angular velocity in θX | 200 mrad/s | |
| Recommended angular velocity in θX | 20 mrad/s | |
| Maximum angular velocity in θY | 200 mrad/s | |
| Recommended angular velocity in θY | 20 mrad/s | |
| Maximum angular velocity in θZ | 200 mrad/s | |
| Recommended angular velocity in θZ | 20 mrad/s | |
| Positioning | H-820.D2 | Tolerance |
| Minimum incremental motion in X | 5 µm | typ. |
| Minimum incremental motion in Y | 5 µm | typ. |
| Minimum incremental motion in Z | 5 µm | typ. |
| Minimum incremental motion in θX | 12.5 µrad | typ. |
| Minimum incremental motion in θY | 12.5 µrad | typ. |
| Minimum incremental motion in θZ | 12.5 µrad | typ. |
| Unidirectional repeatability in X | ± 1.5 µm | typ. |
| Unidirectional repeatability in Y | ± 1.5 µm | typ. |
| Unidirectional repeatability in Z | ± 0.5 µm | typ. |
| Unidirectional repeatability in θX | ± 8 µrad | typ. |
| Unidirectional repeatability in θY | ± 8 µrad | typ. |
| Unidirectional repeatability in θZ | ± 25 µrad | typ. |
| Backlash in X | 30 µm | typ. |
| Backlash in Y | 30 µm | typ. |
| Backlash in Z | 3 µm | typ. |
| Backlash in θX | 30 µrad | typ. |
| Backlash in θY | 30 µrad | typ. |
| Backlash in θZ | 300 µrad | typ. |
| Integrated sensor | Incremental rotary encoder | |
| Drive properties | H-820.D2 | Tolerance |
| Drive type | Brushless DC motor | |
| Nominal voltage | 24 V | |
| Mechanical properties | H-820.D2 | Tolerance |
| Maximum load capacity, base plate horizontal | 20 kg | |
| Maximum load capacity, base plate in any orientation | 10 kg | |
| Maximum holding force, base plate horizontal | 200 N | |
| Maximum holding force, base plate in any orientation | 5 N | |
| Overall mass | 15 kg | |
| Material | Aluminum | |
| Miscellaneous | H-820.D2 | Tolerance |
| Operating temperature range | 0 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | |
| Recommended controllers/drivers | C-887.5x |
Connecting cables are not included in the scope of delivery and must be ordered separately.
Ask about customized versions.
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
H-820 Hexapod Microrobot
Technical note for unpacking the hexapod
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Hexapod, basic model; 20 kg payload; 20 mm/s maximum velocity; D-sub connector. Connecting cables are not included in the scope of delivery and must be ordered separately.
Ricevere rapidamente una risposta alla tua risposta via email o telefono da un Sales Engineer dalla sede PI più vicina a te.

I simulatori di movimento hanno una maggiore richiesta di dinamica di movimento (shakers).

Le piattaforme Hexapod vengono utilizzate per il posizionamento e l'allineamento di precisione di carichi in tutti i sei gradi di libertà. tre assi lineari, e tre assi di rotazione.













